

국내 연구진이 이러한 거미의 먹이잡기에서 착안해 금속이나 세라믹 등을 감지해 붙잡는 거미줄 로봇을 개발했다. 금속이나 세라믹 등 단단한 소재의 로봇을 활용할 수 없는 영역에 적용할 수 있어 소프트 로봇의 잠재력을 끌어올릴 것으로 기대를 모은다.
선정윤·김호영 서울대학교 교수 연구팀은 거미의 행동학적 특성에 착안해 전기로 주변의 물체를 감지해 포획하고, 불필요한 오염물을 스스로 털어내는 거미줄 로봇을 개발했다고 16일 밝혔다.
|
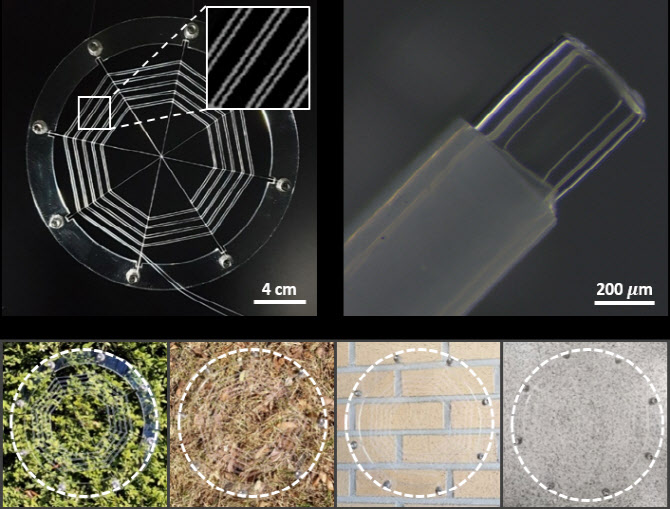
물체 표면에서 나오는 전기장을 감지해 물체와의 상대적 거리를 감지해 실제 접촉하지 않고도 접근을 알아낸다. 충분히 접근했을 때만 물체를 자극해 끌어당기는 방식으로 의도하지 않은 물체에 의한 오염도 피할 수 있다.
연구팀은 차세대 인공 근육, 전자 피부, 로봇 팔 등에 주요 설계 변경 없이도 추가 기능을 부여해 활용범위를 확장시킬 수 있을 것으로 기대했다.
연구 결과는 로봇공학 분야 국제 학술지 ‘사이언스 로보틱스(Science Robotics)’ 저널의 표지논문으로 지난 16일자로 게재됐다.






![[포토]최재해, '정치적 탄핵 매우 유감...자진 사퇴 생각 없다'](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24112900431t.jpg)
![[포토]'모두발언하는 이재명 대표'](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24112900370t.jpg)
![[포토]이데일리 퓨처스포럼 송년회 무대](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24112801622t.jpg)
![[포토]용산국제업무지구 개발계획 공동협약식에서 협약서 서명](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24112801123t.jpg)
![[포토]이틀 연속 폭설에 눈 쌓인 북한산](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24112801096t.jpg)
![[포토]서울리빙디자인페어 in 마곡](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24112800810t.jpg)
![[포토] 서울역 환승센터](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24112800768t.jpg)
![[포토] 미국 캘리포니아 '석류' 첫 출시](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24112800646t.jpg)
![[포토]'돈이 보이는 창' 찾은 함영진 우리은행 부동산리서치랩장](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24112801076t.jpg)
![[포토]통화정책방향 기자간담회, '물 마시는 이창용 한은 총재'](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24112800833t.jpg)


![[단독]SNS 성범죄 증거 삭제 막는다…'불법 영상물 보전명령 도입'](https://image.edaily.co.kr/images/vision/files/NP/S/2024/11/PS24112900101b.jpg)

