

|

이번에 개발된 인공근육 작동장치는 기존 기술보다 3배 이상의 굽힘 변형을 보이고, 5시간 이상 구동해도 성능을 유지할 수 있다.
이번 연구는 어드밴스드 머터리얼스(Advanced Materials) 지난해 12월 15일자 온라인 판에 게재됐다.
최근 플렉서블, 웨어러블 소자에 대한 연구가 활발해지며 인간과 기계 사이의 햅틱(촉각 효과) 기능을 위한 능동형 유연 작동기(soft actuator)가 핵심 부품으로 각광받고 있다.
특히 유연성이 떨어져 첨단 전자제품에 적용이 어려운 기존의 기계식 작동기를 대신해 인간의 근육을 모방한 전기에 반응하는 인공근육형 작동기가 관심을 받고 있다
연구팀은 문제 해결을 위해 그래핀과 화학물질, 전도성 고분자를 이용했다. 황과 질소를 그래핑에 도핑하고 전도성 고분자와 함께 섞어 부드럽고 전도성이 탁월한 유연 전극을 제작했다. 그리고 이를 바탕으로 고성능 인공근육형 작동기를 개발했다.
기존의 금속 기반 작동기가 일주일 이상의 제작 기간이 소요되는데 반해 연구팀이 개발한 그래핀-전도성 고분자 전극 적층 방식의 유연 작동기는 2시간 이내 제작할 수 있는 장점을 갖는다.
또한 황과 질소 등 화학물질을 도핑하는 작업으로 기존 그래핀에 비해 1.5~2배 이상 전기화학 성능이 향상됨을 삼전극 전기화학 테스트를 통해 확인했다.
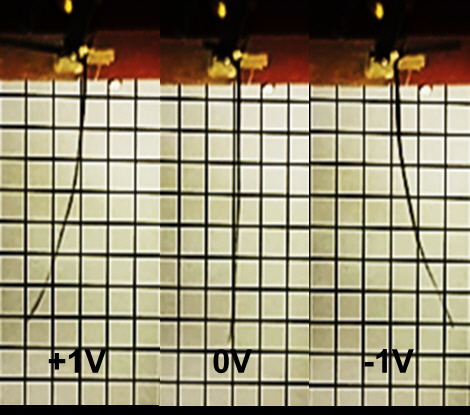
연구팀은 이번에 개발한 작동기는 0.5V와 1V의 낮은 인가전압에서도 대 변형 구동이 가능하고, 기존 대비 3배 이상의 변형을 보이면서도 장시간 성능 지속이 가능하다고 밝혔다.
오 교수는 “고성능 인공근육형 작동기 기술은 향후 첨단 기전소자의 핵심 요소가 될 것이다”며 “특히 3D프린팅 기술과 함께 발전하면 차세대 웨어러블 소자로 상용화 가능성이 높을 것이다”고 말했다.
이번 연구는 미래창조과학부 리더연구자지원사업의 지원을 받아 KAIST 김재환 박사과정, Kotal 박사가 공동 1저자로 참여했고, 네바다 주립대학 라스베가스(UNLV) 기계공학과 김광진 교수팀과의 공동연구를 통해 진행됐다.
|






![[포토]코스피-코스닥 동반 상승 마감](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/12/PS24120300908t.jpg)
![[포토]따스한 온기를 퍼지는 행복촌](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/12/PS24120300829t.jpg)
![[포토]이웃을 위한 연탄나눔봉사활동](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/12/PS24120300804t.jpg)
![[포토]한동훈, '여성의 힘으로 세상을 바꾸자'](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/12/PS24120300792t.jpg)
![[포토]설영희부띠끄 24W/25S 살롱 패션쇼](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/12/PS24120300633t.jpg)
![[포토]유승민 "대한체육회장 공식 출마합니다"](https://spnimage.edaily.co.kr/images/Photo/files/NP/S/2024/12/PS24120300064t.jpg)
![[포토]더불어민주당 원내대책회의](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/12/PS24120300465t.jpg)
![[포토]'모두발언하는 추경호 원내대표'](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/12/PS24120300359t.jpg)

![[포토]의정갈등에 피해는 환자에게…](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/12/PS24120200764t.jpg)



![[단독]공정위, 中 '알테쉬' 제재 절차 밟는다…과징금 규모는](https://image.edaily.co.kr/images/vision/files/NP/S/2024/12/PS24120300940h.jpg)
