[이데일리 채상우 기자] 우리가 일반적으로 떠올리는 드론의 모습은 모두 네 개의 프로펠러를 가지고 있다. 왜 대부분의 드론은 네 개의 프로펠러를 가진 쿼드콥터로 만들어진 것일까.
쿼드콥터의 가장 큰 장점은 동작원리가 기존의 헬리콥터 형태에 비해 매우 간단해 제어가 매우 용이하다는 점이다. 쿼드콥터의 프로펠러(블레이드)는 로터라는 회전축에 장착돼 돌아간다.
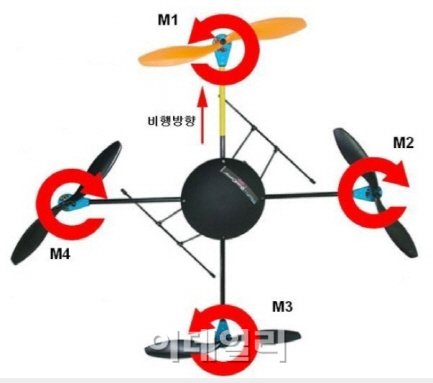 | 쿼드콥터 제어 방식. 사진=hs36 |
|
쿼드콥터의 로터는 네 개로 마주보는 두 개의 로터끼리는 같은 방향으로 인접한 로터는 반대 방향으로 회전해 중심을 잡는다. 각 로터의 회전 속도를 조절하는 것만으로 상승하강 좌우 방향을 자유롭게 조종할 수 있다.
우리가 흔히 보는 헬리콥터 기종인 싱글로터 기체는 중심을 잡기 위해 꼬리에도 소형 로터를 장착해야 하며, 방향 전환과 선회를 위해서는 로터 축을 움직여야 한다. 로터 축과 블레이드 각을 조절해야 한다.
이 같이 제어가 쉬운 쿼드콥터는 자연스레 일반인들이 사용하는 기체에 주로 적용되기 시작했다. 조종법이 쉽고 운항능력도 뛰어나니 다양한 임무에 적용되기에도 적합하다는 장점도 있다.
 | 국내 드론업체 엑스드론의 쿼드콥터 ‘XD-X8’. 사진=엑스드론 |
|
“그렇다면 우리가 자주 보는 헬리콥터에도 로터를 많이 달면 성능이 더욱 좋아지지 않을까”라는 질문을 할 수 있다. 물론 틀린 말은 아니다. 하지만 로터를 추가한다는 것은 자동차로치면 엔진을 하나 더 다는 셈이다. 그만큼 연료소모가 늘어난다. 헬리콥터와 같이 장시간 임무를 수행하는 데는 적합하지 않다.
연료소모 외에 쿼드콥터가 가지고 있는 또 하나의 단점은 로터 하나가 망가지면 그대로 추락한다는 것이다. 이를 보완한 것이 로터가 여섯 개 달린 헥사콥터와 로터가 여덟 개 달린 옥토콥터다. 이들은 로터가 하나 두 개 정도 파손되도 운항이 가능하다. 대신 연료 소모가 그만큼 늘어나게 된다.
결국 쿼드콥터는 연료 효율성과 제어의 용이성을 절충한 최선의 모델인 것이다.








![[포토]'규탄사하는 이재명 대표'](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/12/PS24120401162t.jpg)
![[포토]비상계엄 해제 후 한자리에 모인 한덕수 총리와 국무위원들](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/12/PS24120401092t.jpg)
![[포토]최상목 경제부총리, '어두운 표정'](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/12/PS24120400960t.jpg)
![[포토]청사들어서는 한덕수 총리](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/12/PS24120400786t.jpg)
![[포토] 대통령실 입구의 취재진](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/12/PS24120400817t.jpg)
![[포토]'긴급 의원총회 참석하는 추경호 원내대표'](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/12/PS24120400571t.jpg)
![[포토]'긴박했던 흔적들'](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/12/PS24120400485t.jpg)
![[포토]조국, '국가 비상사태 만든 이는 尹...탄핵해야'](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/12/PS24120400366t.jpg)
![[포토]尹, '비상 계엄 해제할 것'](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/12/PS24120400277t.jpg)
![[포토]코스피-코스닥 동반 상승 마감](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/12/PS24120300908t.jpg)




